Body¶
This abstract class represents an abstract body.
- class Body¶
Bases:
handleAbstract class modeling a generic body of a
BodyTree.- Property Summary
- Parameters¶
Vector of parameters for the body.
- n¶
Number of DoF of the body.
- Method Summary
- D(q, dq)¶
Evaluate the generalized damping force.
- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variables
- I(q)¶
Evaluate the body inertia matrix in the body distal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variables
- J(q, dq)¶
Evaluate the firs-order time derivative of the body inertia matrix in the body distal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variables
- K(q)¶
Evaluate the generalized elastic force.
- Parameters:
q (
[double], [sym]) – Configuration variables
- T(q)¶
Evaluate the relative transformation matrix from the body distal end frame to the body proximal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variables
- Update(q, dq, ddq, options)¶
Update the current state of the body.
- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variablesddq (
[double], [sym]) – Second-order time derivative of the configuration variables
- a_com_rel(q, dq, ddq)¶
Evaluate the second-order time derivative of the center of mass position in the body distal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variablesddq (
[double], [sym]) – Second-order time derivative of the configuration variables
- a_rel(q, dq, ddq)¶
Evaluate the relative linear acceleration of the body distal end frame in the body proximal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variablesddq (
[double], [sym]) – Second-order time derivative of the configuration variables
- domega_rel(q, dq, ddq)¶
Evaluate the relative angular acceleration of the body distal end frame in the body proximal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variablesddq (
[double], [sym]) – Second-order time derivative of the configuration variables
- grad_J(q)¶
Evaluate
 , where
, where  is the first-order time derivative of the body inertia.
is the first-order time derivative of the body inertia.- Parameters:
q (
[double], [sym]) – Configuration variables
- grad_int_r_X_dr(q)¶
Evaluate
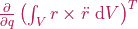 , where
, where  is the relative position vector of the body particle in the body distal end frame.
is the relative position vector of the body particle in the body distal end frame.- Parameters:
q (
[double], [sym]) – Configuration variables
- grad_v_com(q)¶
Evaluate
 , where
, where  is the position of the center of mass in the body distal end frame.
is the position of the center of mass in the body distal end frame.- Parameters:
q (
[double], [sym]) – Configuration variables
- int_dr_X_pv_r(q, dq)¶
Evaluate
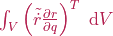 , where is the relative position vector of the body particle in the body distal end frame.
, where is the relative position vector of the body particle in the body distal end frame.- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variables
- int_pv_r_O_dd_r(q, dq, ddq)¶
Evaluate
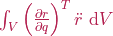 , where is the relative position vector of the body particle in the body distal end frame.
, where is the relative position vector of the body particle in the body distal end frame.- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variablesddq (
[double], [sym]) – Second-order time derivative of the configuration variables
- int_r_X_ddr(q, dq, ddq)¶
Evaluate
 , where is the relative position vector of the body particle in the body distal end frame.
, where is the relative position vector of the body particle in the body distal end frame.- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variablesddq (
[double], [sym]) – Second-order time derivative of the configuration variables
- int_r_X_dr(q, dq)¶
Evaluate
 , where is the relative position vector of the body particle in the body distal end frame.
, where is the relative position vector of the body particle in the body distal end frame.- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variables
- m()¶
Evaluate the body mass.
- omega_par(q)¶
Evaluate the Jacobian of the relative angular velocity of the body distal end frame in its frame.
- Parameters:
q (
[double], [sym]) – Configuration variables
- omega_rel(q, dq)¶
Evaluate the relative angular velocity of the body distal end frame in the body proximal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variables
- p_com(q)¶
Evaluate the center of mass position in the body distal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variables
- toStruct()¶
Convert the body object to a struct representation.
- v_com_rel(q, dq)¶
Evaluate the first-order time derivative of the center of mass position in the body distal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variables
- v_par(q)¶
Evaluate the Jacobian of the relative linear velocity of the body distal end frame in its frame.
- Parameters:
q (
[double], [sym]) – Configuration variables
- v_rel(q, dq)¶
Evaluate the relative linear velocity of the body distal end frame in the body proximal end frame.
- Parameters:
q (
[double], [sym]) – Configuration variablesdq (
[double], [sym]) – First-order time derivative of the configuration variables